Revolutionizing Space Exploration: How Digital Twins Could Save Mars Missions!
2025-08-15
Author: Yu
The Future of Planetary Exploration is Here!
As we set our sights on Mars, the success of future missions hinges on seamless human-robot collaboration. This dynamic interaction is pivotal for ensuring the safety of astronauts and maximizing the scientific discoveries waiting to be uncovered.
Unlocking New Possibilities with Digital Twins
Enter the concept of digital twins—a groundbreaking tool designed for planning, simulating, and optimizing extravehicular activities (EVAs). The latest study presents an innovative digital twin developed for the AMADEE-24 analog Mars mission, set to take place in Armenia in March 2024 under the auspices of the Austrian Space Forum.
Navigating GNSS-Denied Territory: The Power of Local Positioning Methods
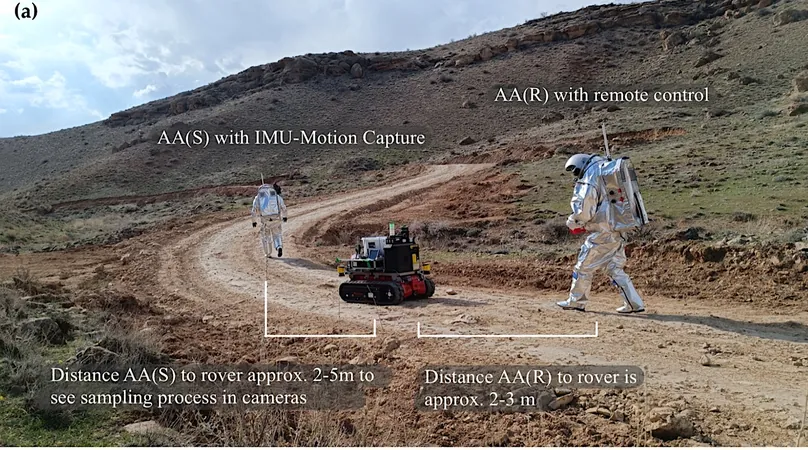
This ambitious research project assessed alternative local positioning methods to enhance navigation in environments where Global Navigation Satellite Systems (GNSS) are unreliable. By harnessing telemetry from space suit simulators, inertial measurement units (IMUs), and data from the innovative Intuitive Rover Operation and Collecting Samples (iROCS) rover, researchers sought to recreate nine critical experiment runs.
Revolutionary Findings: Positioning Techniques that Compete with GPS!
The findings are staggering! The study revealed that both Simultaneous Localization and Mapping (SLAM)-based rover positioning and IMU-MoCap localization for astronauts achieved remarkable accuracy, rivalling that of traditional GPS. Interestingly, while Adaptive Cluster Detection showed some discrepancies, it marked a significant step in exploring alternative localization capabilities.
Visualizing the Future: Experimental Design and Integration Workflow
The integration of the digital twin is meticulously illustrated in a comprehensive workflow, showcasing data acquisition, preprocessing, and insightful analysis leading to synthesis within the system. A vibrant visual representation details the experimental setup focused on testing various localization methods, highlighting points of interest during EVAs.
Mapping New Frontiers: Terrain Scanning and Localization
The study also utilized advanced Universal Multi-Layer Map (UMM) technology to capture LiDAR scans, generating detailed point clouds of the terrain. Notably, the traversability map indicated safe navigation routes, while potential hazards were clearly marked, ensuring astronauts could maneuver efficiently.
Embracing Innovation for Martian Exploration
In a world where data and technology converge, these findings underline the transformative potential of digital twin integration in analog Mars missions. As we prepare to forge new paths on the Red Planet, innovative localization techniques could redefine how we approach space exploration. The future is indeed bright for interplanetary adventures!


 Brasil (PT)
Brasil (PT)
 Canada (EN)
Canada (EN)
 Chile (ES)
Chile (ES)
 Česko (CS)
Česko (CS)
 대한민국 (KO)
대한민국 (KO)
 España (ES)
España (ES)
 France (FR)
France (FR)
 Hong Kong (EN)
Hong Kong (EN)
 Italia (IT)
Italia (IT)
 日本 (JA)
日本 (JA)
 Magyarország (HU)
Magyarország (HU)
 Norge (NO)
Norge (NO)
 Polska (PL)
Polska (PL)
 Schweiz (DE)
Schweiz (DE)
 Singapore (EN)
Singapore (EN)
 Sverige (SV)
Sverige (SV)
 Suomi (FI)
Suomi (FI)
 Türkiye (TR)
Türkiye (TR)
 الإمارات العربية المتحدة (AR)
الإمارات العربية المتحدة (AR)