Revolutionary Robotic Gripper Mimics Human Hand, Transforming Object Handling!
2025-01-03
Author: John Tan
Introduction
In a remarkable breakthrough, researchers from Seoul National University have developed an innovative robotic gripper that captures the essence of human dexterity by allowing the simultaneous handling of multiple objects. Inspired by the natural human ability to grasp and move various items at once, this cutting-edge technology aims to revolutionize pick-and-place processes in both industrial and domestic settings. The findings were published in the prestigious journal *Science Robotics*.
Motivation Behind the Research
Motivated by the efficiency observed among factory workers who seamlessly transfer multiple items simultaneously, the research team embarked on their project in 2019. Traditional robotic grippers typically focus on transferring a single object at a time, which significantly limits their application in dynamic environments. This new gripper, however, is built around the concept of 'multi-object grasping,' showcasing its adaptability beyond the rigid confines of structured settings.
Key Statements from the Research Team
Professor Kyu-Jin Cho, a leading figure in this research, stated, 'Previous gripper designs fell short of mimicking human capability. While some have attempted to create multi-object grippers, their design often forces them to function solely in highly structured environments.' This research initiative breaks new ground by extracting and applying human motion principles to robotics.
Innovative Design Features
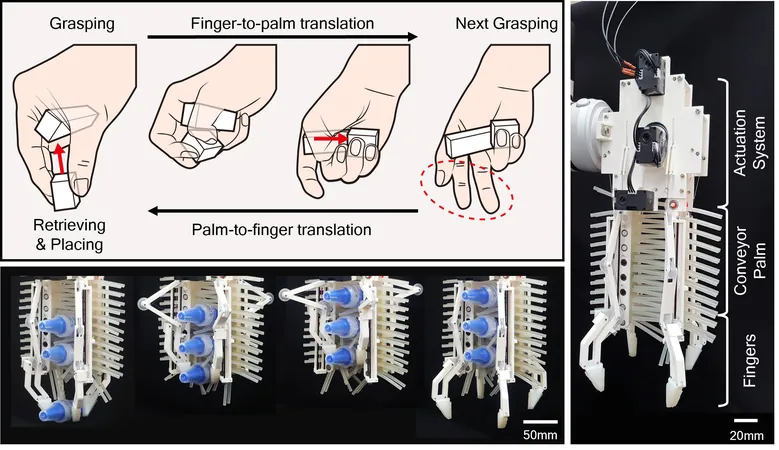
The key to the gripper's design lies in its ability to perform two essential movements: finger-to-palm translation and palm-to-finger translation. Mimicking the way humans gather items—transporting them to their palms for easier handling—the gripper can handle multiple objects at once and then deploy them individually at predetermined locations.
Functionality of MOGrip
The practical functionality of this gripper, dubbed MOGrip, is further enhanced by a unique structure that utilizes a conveyor palm equipped with flexible belts and elastic hairs. These elements work in concert to securely store objects while allowing for smooth transitions between gripping and transferring motions. Each finger of the gripper operates via two motors that skillfully manage the complex grasping and transferring tasks.
Efficiency and Testing Results
Through extensive lab testing, the research team demonstrated that MOGrip can dramatically enhance efficiency, reducing the time taken to move eight objects from a shelf by 34% and cutting the robotic arm’s travel distance by an impressive 71% compared to traditional single-object methods. The implications of this technology stretch far and wide, from streamlining logistics operations to improving household chores.
Broader Implications and Future Prospects
Professor Cho emphasized the broader importance of this work: 'Our goal is not merely to replicate human movements but to distill fundamental principles that can be adapted for robotic solutions.' The innovative designs could have profound impacts on various industries, paving the way for sophisticated robotic solutions in environments such as warehouses, manufacturing, and even everyday home tasks.
Conclusion
This groundbreaking technology is set to make waves in the robotics field, addressing a previously unmanageable challenge: how to imitate true human-like motion in a robot. As researchers continue to refine MOGrip, its potential applications could set the stage for the next generation of intelligent automation, changing how we think about robotic helpers in our lives and workplaces! Stay tuned—this is only the beginning of a robotic revolution!


 Brasil (PT)
Brasil (PT)
 Canada (EN)
Canada (EN)
 Chile (ES)
Chile (ES)
 Česko (CS)
Česko (CS)
 대한민국 (KO)
대한민국 (KO)
 España (ES)
España (ES)
 France (FR)
France (FR)
 Hong Kong (EN)
Hong Kong (EN)
 Italia (IT)
Italia (IT)
 日本 (JA)
日本 (JA)
 Magyarország (HU)
Magyarország (HU)
 Norge (NO)
Norge (NO)
 Polska (PL)
Polska (PL)
 Schweiz (DE)
Schweiz (DE)
 Singapore (EN)
Singapore (EN)
 Sverige (SV)
Sverige (SV)
 Suomi (FI)
Suomi (FI)
 Türkiye (TR)
Türkiye (TR)
 الإمارات العربية المتحدة (AR)
الإمارات العربية المتحدة (AR)