China Launches Groundbreaking Space Mining Robot: A New Era in Extraterrestrial Exploration!
2025-03-16
Author: Rajesh
Introduction
In an extraordinary leap forward for space exploration, the China University of Mining and Technology (CUMT) has unveiled the nation’s first homegrown space mining robot. This pioneering prototype is not just a technological marvel; it’s specifically engineered to operate in the microgravity conditions of space, tackling the treacherous and uneven terrain of asteroids, as reported by CCTV News.
Design and Features
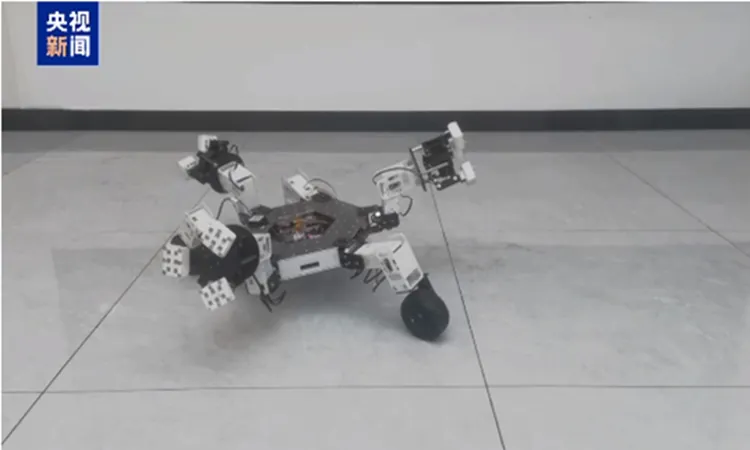
Leading the ambitious project is Professor Liu Xinhua, whose research team successfully designed a robot that features a unique six-legged configuration, combining three wheeled limbs with three specialized clawed limbs. This advanced design is crucial for adapting to the challenges of low gravity environments, especially given that lunar gravity is only one-sixth that of Earth’s. Asteroids present even greater levels of challenge, with ultra-low gravity that complicates drilling operations.
Innovative Bionic Claw Design
One of the standout features of this innovative robot is its bionic claw design, which draws inspiration from the natural adhesive capabilities of insect feet. This design enhances the robot's stability and anchoring abilities, allowing it to effectively collect samples while moving over irregular surfaces. 'Our claw design increases adhesion in microgravity, allowing for precise sampling and navigation,' Professor Liu explained.
Overcoming Geological Challenges
The complexity of space mining requires overcoming significant geological obstacles. Under Earth's gravity, the robot can easily penetrate surfaces; however, working on celestial bodies requires a completely different set of engineering solutions. In response to these challenges, the CUMT team created a simulated training ground that mimics the extreme conditions of near-Earth asteroids using sandy soil and a differential suspension system that replicates microgravity.
Advanced Training and Testing
Further refining their technology, the research team plans to conduct advanced training at CUMT’s State Key Laboratory of Intelligent Construction and Healthy Operation and Maintenance of Deep Underground Engineering. This facility is equipped to precisely simulate the severe conditions found on the lunar surface. The goal is to achieve high-fidelity tests with simulated lunar soil that closely resembles real lunar regolith, ensuring that the robot can perform in conditions nearly identical to those on the Moon.
The Future of Space Mining
As global interest in space resources escalates, it’s clear that China is positioning itself at the forefront of this new frontier. The implications of successful space mining could revolutionize not just how we gather resources but also how we approach sustainability on Earth. With the successful patent application and initial review of their prototype, CUMT is set to play a critical role in humanity’s exploration of extraterrestrial resources.
Conclusion
The future of space mining has arrived, and China is leading the charge! Expect more groundbreaking updates from this innovative research team as they continue their journey into the cosmos.


 Brasil (PT)
Brasil (PT)
 Canada (EN)
Canada (EN)
 Chile (ES)
Chile (ES)
 Česko (CS)
Česko (CS)
 대한민국 (KO)
대한민국 (KO)
 España (ES)
España (ES)
 France (FR)
France (FR)
 Hong Kong (EN)
Hong Kong (EN)
 Italia (IT)
Italia (IT)
 日本 (JA)
日本 (JA)
 Magyarország (HU)
Magyarország (HU)
 Norge (NO)
Norge (NO)
 Polska (PL)
Polska (PL)
 Schweiz (DE)
Schweiz (DE)
 Singapore (EN)
Singapore (EN)
 Sverige (SV)
Sverige (SV)
 Suomi (FI)
Suomi (FI)
 Türkiye (TR)
Türkiye (TR)
 الإمارات العربية المتحدة (AR)
الإمارات العربية المتحدة (AR)